You're viewing the old homepage. The new homepage of Jürgen Sturm is located here: http://jsturm.de.
I am fascinated by the immense progress and application potential of computer vision and robotics research. My motivation is to push the state-of-the-art by developing novel approaches and applying these methods to solve real-world problems. For example, our approach to autonomous quadrocopter flight enables a low-cost quadrocopter to follow its trajectory using a camera as its main sensor while taking a series of images. Our 3D reconstruction algorithm allows to scan persons in 3D and print the acquired model as a small figure. As I see a large potential for commercial applications of such methods, I recently co-founded the university spin-off FabliTec to bring this technology to market.
I am currently working in the following research areas:
RGB-D sensors (Kinect) including visual odometry, SLAM, dense 3D reconstruction, mapping, localization, pose tracking and benchmarking
Quadcopter, including camera-based localization, dense mapping, data fusion, safe navigation and, when all of this works, flying manipulation
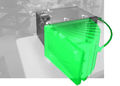
CopyMe3D: Scanning and Printing Persons in 3D(J. Sturm, E. Bylow, F. Kahl and D. Cremers), In German Conference on Pattern Recognition (GCPR), 2013.
[bibtex][pdf]
[]
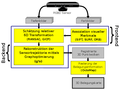
Graph-based bundle adjustment for INS-camera calibration(D. Bender, M. Schikora, J. Sturm and D. Cremers), In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
[bibtex][pdf]Best research paper award
[]
Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance Functions(E. Bylow, J. Sturm, C. Kerl, F. Kahl and D. Cremers), In Robotics: Science and Systems Conference (RSS), 2013.
[bibtex][pdf]
[]
Robust Odometry Estimation for RGB-D Cameras(C. Kerl, J. Sturm and D. Cremers), In International Conference on Robotics and Automation (ICRA), 2013.
[bibtex][pdf]Best Vision Paper Award - Finalist
2012
[]
A Benchmark for the Evaluation of RGB-D SLAM Systems(J. Sturm, N. Engelhard, F. Endres, W. Burgard and D. Cremers), In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[bibtex][pdf]
[]
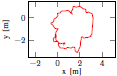
Camera-Based Navigation of a Low-Cost Quadrocopter(J. Engel, J. Sturm and D. Cremers), In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[bibtex][pdf][video]
[]
An Evaluation of the RGB-D SLAM System(F. Endres, J. Hess, N. Engelhard, J. Sturm, D. Cremers and W. Burgard), In International Conference on Robotics and Automation (ICRA), 2012.
[bibtex][pdf]
2009
[]
Learning Kinematic Models for Articulated Objects(J. Sturm, V. Pradeep, C. Stachniss, C. Plagemann, K. Konolige and W. Burgard), In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), 2009.
[bibtex][pdf]
2008
[]
Adaptive Body Scheme Models for Robust Robotic Manipulation(J. Sturm, C. Plagemann and W. Burgard), In Robotics: Science and Systems Conference (RSS), 2008.
[bibtex][pdf]
PhD Thesis
2011
[]
Approaches to Probabilistic Model Learning for Mobile Manipulation Robots(J. Sturm), PhD thesis, University of Freiburg, 2011.
[bibtex][pdf]Received the Artificial Intelligence Dissertation Award 2011 (ECCAI) and the Wolfgang-Genter-Award 2011 (University of Freiburg); Finalist at the Georges-Giralt-Award 2012 (EURON); Selected for the Best Paper Track at IJCAI 2013
Other Publications
2012
[]
Lecture Notes: Visual Navigation for Flying Robots(J. Sturm), Technische Universität München, Germany, 2012.
[bibtex][pdf]Distinguished with the TUM TeachInf Award for the best lecture in summer term 2012